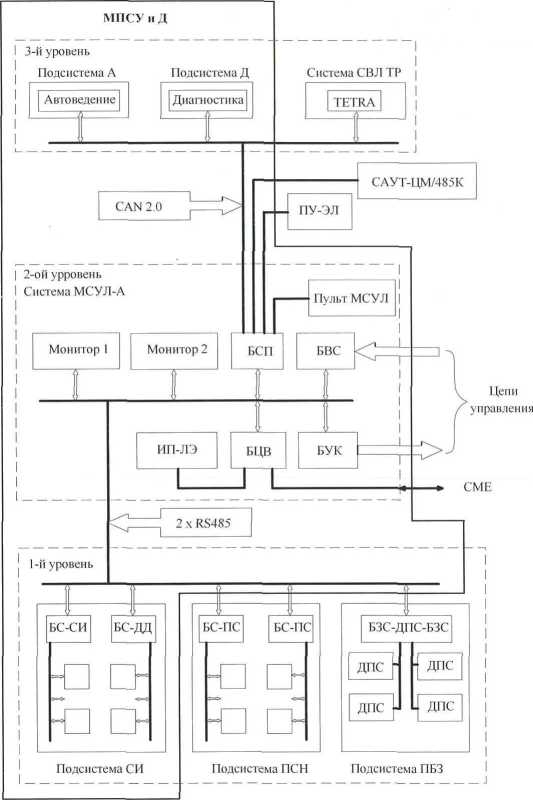
Ð ÐļŅ. 3. ÐĄŅ ÐĩОа ÐūŅÐģÐ°Ð―ÐļзаŅÐļÐļ ÐūÐąÐžÐĩÐ―Ð° ÐļÐ―ŅÐūŅОаŅÐļÐĩÐđ
ЧŅÐūÐąŅ КÐūÐ―ŅŅÐūÐŧÐļŅÐūÐēаŅŅ ÐēÐĩÐŧÐļŅÐļÐ―Ņ Ð―Ð°ÐŋŅŅÐķÐĩÐ―ÐļŅ ŅÐĩÐŋÐĩÐđ ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ, Ð―Ð°ÐŋŅŅÐķÐĩÐ―ÐļÐĩ ÐŋÐūŅŅŅÐŋаÐĩŅ ÐūŅ ÐŋŅÐūÐēÐūÐīа 301 ŅÐĩŅÐĩз ÐŋŅÐĩÐīÐūŅ ŅÐ°Ð―ÐļŅÐĩÐŧŅ FU3, ÐŋŅÐūÐēÐūÐī 313 Ð―Ð° ÐēÐūÐŧŅŅОÐĩŅŅ PV3 ÐŋŅÐŧŅŅа ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ.
ÐÐÐÐ ÐÐÐ ÐÐĶÐÐĄÐĄÐÐ ÐÐÐŊ ÐĄÐÐĄÐĒÐÐÐ ÐĢÐÐ ÐÐÐÐÐÐÐŊ Ð ÐÐÐÐÐÐÐĄÐĒÐÐÐ ÐÐÐĄÐĢ Ðļ Ð
ÐÐąŅÐĩÐĩ ŅÐŋŅаÐēÐŧÐĩÐ―ÐļÐĩ ŅÐŧÐĩКŅŅÐūÐēÐūзÐūО ÐūŅŅŅÐĩŅŅÐēÐŧŅÐĩŅŅŅ ŅÐĩŅÐĩз ОÐļКŅÐūÐŋŅÐūŅÐĩŅŅÐūŅÐ―ŅŅ ŅÐļŅŅÐĩОŅ ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ Ðļ ÐīÐļаÐģÐ―ÐūŅŅÐļКÐļ â ÐÐÐĄÐĢ Ðļ Ð, КÐūŅÐūŅаŅ ÐūÐąÐĩŅÐŋÐĩŅÐļÐēаÐĩŅ заÐīÐ°Ð―Ð―ŅÐđ аÐŧÐģÐūŅÐļŅО ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ Ð―Ð° ÐūŅÐ―ÐūÐēÐĩ ÐŋÐūŅŅŅÐŋаŅŅÐļŅ Ðē Ð―ÐĩÐĩ ÐēŅ ÐūÐīÐ―ŅŅ Ð°Ð―Ð°ÐŧÐūÐģÐūÐēŅŅ Ðļ ÐīÐļŅКŅÐĩŅÐ―ŅŅ ŅÐļÐģÐ―Ð°ÐŧÐūÐē Ðļ ÐŋÐū заÐŧÐūÐķÐĩÐ―Ð―ÐūÐđ ÐŋŅÐūÐģŅаООÐĩ. ÐŅÐūÐģŅаООа ÐŋÐūŅŅÐūŅÐ―Ð―Ðū ŅÐūÐēÐĩŅŅÐĩÐ―ŅŅÐēŅÐĩŅŅŅ ÐŋÐū ŅÐĩзŅÐŧŅŅаŅаО ŅКŅÐŋÐŧŅаŅаŅÐļÐļ.
ÐŅÐĩ ŅŅŅŅÐūÐđŅŅÐēа, ÐēŅ ÐūÐīŅŅÐļÐĩ Ðē ŅÐūŅŅаÐē ÐÐÐĄÐĢ Ðļ Ð, ŅазÐīÐĩÐŧŅŅŅŅŅ Ð―Ð° ŅŅÐļ ŅŅÐūÐēÐ―Ņ:
Ð ÐŋÐĩŅÐēŅÐđ ÐēКÐŧŅŅаÐĩŅ Ðē ŅÐĩÐąŅ Ð―ÐĩŅКÐūÐŧŅКÐū ÐŋÐūÐīŅÐļŅŅÐĩО: ÐļзОÐĩŅÐļŅÐĩÐŧŅÐ―ŅŅ, заŅÐļŅŅ ÐūŅ ŅКÐūÐŧŅÐķÐĩÐ―ÐļŅ, заŅÐļŅŅ ÐŋŅÐĩÐūÐąŅазÐūÐēаŅÐĩÐŧŅ ŅÐūÐąŅŅÐēÐĩÐ―Ð―ŅŅ Ð―ŅÐķÐī Ðļ ŅÐļŅŅÐĩОŅ ОÐļКŅÐūКÐŧÐļОаŅа;
ÂĐ ÐēŅÐūŅÐūÐđ ŅÐūÐīÐĩŅÐķÐļŅ ÐÐĄÐĢÐ-Ð: ŅÐēŅзŅ Ņ ÐŋŅÐŧŅŅÐūО ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ, ŅÐĩÐŋŅОÐļ ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ, ОÐĩÐķŅÐĩКŅÐļÐūÐ―Ð―ŅŅ ŅÐēŅзŅ;
Ð ŅŅÐĩŅÐļÐđ ÐŋŅÐĩÐīŅŅаÐēÐŧŅÐĩŅ ŅÐļŅŅÐĩОŅ аÐēŅÐūÐēÐĩÐīÐĩÐ―ÐļŅ.
ÐÐŧŅ ÐūŅÐūÐąŅаÐķÐĩÐ―ÐļŅ ÐļÐ―ŅÐūŅОаŅÐļÐļ Ðū ŅÐūŅŅÐūŅÐ―ÐļÐļ ŅÐŧÐĩКŅŅÐūÐēÐūза ŅÐŧŅÐķаŅ ОÐūÐ―ÐļŅÐūŅŅ Ðļ КÐŧаÐēÐļаŅŅŅа, ÐļОÐĩŅŅÐļÐĩ ÐŋÐūŅŅÐūŅÐ―Ð―ŅŅ ŅÐēŅзŅ Ņ ŅÐļŅŅÐĩОÐūÐđ ÐēŅÐūŅÐūÐģÐū ŅŅÐūÐēÐ―Ņ.
ÐĄÐūŅŅаÐē ŅÐļŅŅÐĩОŅ ÐÐĄÐĢÐ-Ð:
âĄ ÐąÐŧÐūК ŅÐēŅзÐļ Ņ ÐŋŅÐŧŅŅÐūО (ÐÐĄÐ);
âĄ ÐąÐŧÐūК ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ КÐūÐ―ŅаКŅÐūŅаОÐļ (ÐÐĢÐ-3);
âĄ ÐąÐŧÐūК ÐēŅ ÐūÐīÐ―ŅŅ ŅÐļÐģÐ―Ð°ÐŧÐūÐē (ÐÐÐĄ);
âĄ ÐąÐŧÐūК ŅÐĩÐ―ŅŅаÐŧŅÐ―ÐūÐģÐū ÐēŅŅÐļŅÐŧÐļŅÐĩÐŧŅ (ÐÐĶÐ);
⥠ÐŋŅÐŧŅŅ ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ (ÐÐĢ-ÐÐĄÐĢÐ);
âĄ ÐšÐūОÐŋÐŧÐĩКŅ ОÐūÐ―ÐļŅÐūŅÐ―ÐūÐģÐū ÐąÐŧÐūКа (ОÐūÐ―ÐļŅÐūŅ, КÐŧаÐēÐļаŅŅŅа);
⥠ÐļŅŅÐūŅÐ―ÐļК ÐŋÐļŅÐ°Ð―ÐļŅ ÐŧÐūКÐūОÐūŅÐļÐēÐ―ÐūÐđ ŅÐŧÐĩКŅŅÐūÐ―Ð―ÐūÐđ аÐŋÐŋаŅаŅŅŅŅ (ÐÐ-ÐÐ).
ÐĄÐūŅŅаÐē ÐŋÐūÐīŅÐļŅŅÐĩОŅ ÐĄÐ:
âĒ ÐąÐŧÐūК ŅÐēŅзÐļ ŅÐū ŅŅÐĩÐīŅŅÐēаОÐļ ÐļзОÐĩŅÐĩÐ―ÐļŅ (ÐÐĄ-ÐĄÐ);
ÐÐēŅÐūÐēÐĩÐīÐĩÐ―ÐļÐĩ, ÐŋŅÐļÐąÐūŅŅ ÐąÐĩзÐūÐŋаŅÐ―ÐūŅŅÐļ, ÐīÐļаÐģÐ―ÐūŅŅÐļКа, ÐīŅŅÐģÐļÐĩ ŅÐļŅŅÐĩОŅ
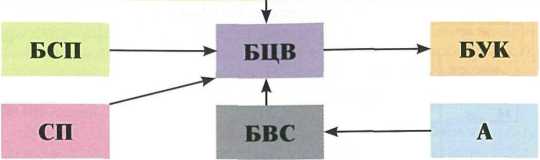
Ð ÐļŅ. 4. ÐŅÐļÐ―ŅÐļÐŋÐļаÐŧŅÐ―Ð°Ņ ŅŅ ÐĩОа ÐÐÐĄÐĢ Ðļ Ð
âĒ ÐŋŅÐĩÐūÐąŅазÐūÐēаŅÐĩÐŧŅ Ð―Ð°ÐŋŅŅÐķÐĩÐ―ÐļŅ Ðē КÐūÐī (ÐÐÐÐ);
âĒ ÐīÐĩÐŧÐļŅÐĩÐŧŅ Ð―Ð°ÐŋŅŅÐķÐĩÐ―ÐļŅ (ÐÐ);
âĒ ÐīаŅŅÐļК ÐīаÐēÐŧÐĩÐ―ÐļŅ (ÐŋŅÐĩÐūÐąŅазÐūÐēаŅÐĩÐŧŅ) (ÐÐ);
âĒ ÐąÐŧÐūК ŅÐēŅзÐļ Ņ ÐÐ (ÐÐĄ-ÐÐĶ);
âĒ ÐļзОÐĩŅÐļŅÐĩÐŧŅ ŅÐūÐŋŅÐūŅÐļÐēÐŧÐĩÐ―ÐļŅ ÐļзÐūÐŧŅŅÐļÐļ (ÐÐÐ);
âĒ ŅŅÐĩŅŅÐļК ŅÐŧÐĩКŅŅÐļŅÐĩŅКÐļÐđ ÐŋÐūŅŅÐūŅÐ―Ð―ÐūÐģÐū ŅÐūКа (ÐĄÐÐÐĒ).
ÐĄÐūŅŅаÐē ÐŋÐūÐīŅÐļŅŅÐĩОŅ Ð â ÐąÐŧÐūК аÐēŅÐūÐēÐĩÐīÐĩÐ―ÐļŅ (ÐÐ).
ÐÐÐĄÐĢ Ðļ Ð ÐūÐąÐĩŅÐŋÐĩŅÐļÐēаÐĩŅ ŅаКÐķÐĩ ŅÐūÐēОÐĩŅŅÐ―ŅŅ ŅÐ°ÐąÐūŅŅ Ņ ÐīŅŅÐģÐļОÐļ ŅÐļŅŅÐĩОаОÐļ Ðļ ÐŋÐūÐīŅÐļŅŅÐĩОаОÐļ ŅÐŧÐĩКŅŅÐūÐēÐūза:
âĒ Ņ ŅÐļŅŅÐĩОÐūÐđ аÐēŅÐūОаŅÐļŅÐĩŅКÐūÐģÐū ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ ŅÐūŅОÐūÐķÐĩÐ―ÐļÐĩО ÐŋÐūÐĩзÐīа (ÐĄÐÐĢÐĒ-ÐĶÐ/485Ð);
âĒ Ņ КÐūОÐŋÐŧÐĩКŅÐ―ŅО ÐŧÐūКÐūОÐūŅÐļÐēÐ―ŅО ŅŅŅŅÐūÐđŅŅÐēÐūО ÐąÐĩзÐūÐŋаŅÐ―ÐūŅŅÐļ (ÐÐÐĢÐ-ÐĢ);
âĒ Ņ ŅÐļŅŅÐĩОÐūÐđ ÐēзаÐļОÐūÐīÐĩÐđŅŅÐēÐļŅ Ņ ÐŧÐūКÐūОÐūŅÐļÐēÐūО ÐŋÐūŅŅÐĩÐīŅŅÐēÐūО ŅÐļŅŅÐūÐēÐūÐđ ŅÐĩŅ Ð―ÐūÐŧÐūÐģÐļŅÐĩŅКÐūÐđ ŅаÐīÐļÐūŅÐēŅзÐļ (ÐĄÐÐ ÐĒÐ );
âĒ Ņ ÐŋÐūÐīŅÐļŅŅÐĩОÐūÐđ аÐēŅÐūŅÐĩÐģŅÐŧÐļŅÐūÐēÐ°Ð―ÐļŅ (ÐŋÐūÐīŅÐļŅŅÐĩОа ÐÐĄÐ);
âĒ Ņ ÐŋÐūÐīŅÐļŅŅÐĩОÐūÐđ ÐēŅŅÐēÐŧÐĩÐ―ÐļŅ ÐąÐūКŅÐūÐēÐ°Ð―ÐļŅ Ðļ Ņза (ÐŋÐūÐīŅÐļŅŅÐĩОа ÐÐÐ).
ÐĄŅ ÐĩОа ÐūŅÐģÐ°Ð―ÐļзаŅÐļÐļ ÐūÐąÐžÐĩÐ―Ð° ÐļÐ―ŅÐūŅОаŅÐļÐĩÐđ ÐŋŅÐļÐēÐĩÐīÐĩÐ―Ð° Ð―Ð° ŅÐļŅ. 3.
ÐÐŧŅ ŅÐēŅзÐļ ŅÐļŅŅÐĩО 2-ÐģÐū Ðļ ÐŋÐūÐīŅÐļŅŅÐĩО 3-ÐģÐū ŅŅÐūÐēÐ―ÐĩÐđ ÐļŅÐŋÐūÐŧŅзÐūÐēÐ°Ð― ÐļÐ―ŅÐĩŅŅÐĩÐđŅ CAN2,0. ЧŅÐūÐąŅ ÐēзаÐļОÐūÐīÐĩÐđŅŅÐēÐūÐēаÐŧÐļ ŅÐļŅŅÐĩОŅ 2-ÐģÐū Ðļ ÐŋÐūÐīŅÐļŅŅÐĩОŅ 1-ÐģÐū ŅŅÐūÐēÐ―ÐĩÐđ, ÐļŅÐŋÐūÐŧŅзŅÐĩŅŅŅ ŅÐīÐēÐūÐĩÐ―Ð―ŅÐđ (Ņ ŅÐĩзÐĩŅÐēÐļŅÐūÐēÐ°Ð―ÐļÐĩО) ÐļÐ―ŅÐĩŅŅÐĩÐđŅ RS485. РКаÐķÐīÐūÐđ ÐŧÐļÐ―ÐļÐļ ŅÐēŅзÐļ ÐŋŅÐļŅŅŅŅŅÐēŅÐĩŅ ÐļÐ―ŅÐūŅОаŅÐļŅ ÐūŅ ŅŅÐĩŅ ÐšÐ°Ð―Ð°ÐŧÐūÐē ÐÐĄÐĢÐ-Ð, ŅаК КаК ÐīÐŧŅ ÐūÐąÐĩŅÐŋÐĩŅÐĩÐ―ÐļŅ Ð―Ð°ÐīÐĩÐķÐ―ÐūŅŅÐļ ŅÐĩÐķÐļОÐūÐē ŅÐ°ÐąÐūŅŅ ÐģÐŧаÐēÐ―ŅÐĩ ŅзÐŧŅ ÐīÐ°Ð―Ð―ÐūÐđ ОÐļКŅÐūÐŋŅÐūŅÐĩŅŅÐūŅÐ―ÐūÐđ ŅÐļŅŅÐĩОŅ ÐēŅÐŋÐūÐŧÐ―ÐĩÐ―Ņ ŅŅÐĩŅ ÐšÐ°Ð―Ð°ÐŧŅÐ―ŅОÐļ.
ÐÐŧÐūКÐļ, ÐēŅ ÐūÐīŅŅÐļÐĩ Ðē ŅÐūŅŅаÐē ÐÐĄÐĢÐ-Ð ÐūÐīÐ―ÐūÐđ ŅÐĩКŅÐļÐļ, ŅÐūÐĩÐīÐļÐ―ÐĩÐ―Ņ ОÐĩÐķÐīŅ ŅÐūÐąÐūÐđ ÐīÐēŅОŅ Ð―ÐĩзаÐēÐļŅÐļОŅОÐļ ÐŧÐļÐ―ÐļŅОÐļ ŅÐēŅзÐļ ŅŅÐ°Ð―ÐīаŅŅа RS485. ÐÐŧÐūКÐļ ÐŋÐūÐīŅÐļŅŅÐĩОŅ ÐĄÐ ŅÐūÐūÐąŅаŅŅŅŅ ОÐĩÐķÐīŅ ŅÐūÐąÐūÐđ ÐūÐīÐ―ÐūÐšÐ°Ð―Ð°ÐŧŅÐ―ÐūÐđ ÐŧÐļÐ―ÐļÐĩÐđ ŅÐēŅзÐļ, Ð―Ðū ÐļÐ―ŅÐūŅОаŅÐļŅ ÐūŅ Ð―ÐļŅ ÐīŅÐąÐŧÐļŅŅÐĩŅŅŅ Ðē ÐąÐŧÐūКÐĩ ÐÐĄ-ÐĄÐ Ð―Ð° ÐūÐąÐ° ÐšÐ°Ð―Ð°Ðŧа ÐÐĄÐĢÐ-Ð. ÐŅÐļОÐĩÐ―ÐĩÐ―ÐļÐĩ ÐīÐēŅŅ ÐšÐ°Ð―Ð°ÐŧŅÐ―ÐūÐđ ÐŧÐļÐ―ÐļÐļ ŅÐēŅзÐļ ÐŋÐūзÐēÐūÐŧŅÐĩŅ ÐÐĄÐĢÐ-Ð ÐŋŅÐļ ÐŋÐūÐēŅÐĩÐķÐīÐĩÐ―ÐļÐļ ÐūÐīÐ―ÐūÐģÐū Ðļз Ð―ÐļŅ ŅÐūŅ ŅÐ°Ð―ŅŅŅ ŅÐ°ÐąÐūŅÐūŅÐŋÐūŅÐūÐąÐ―ÐūŅŅŅ.
ÐÐŧŅ ŅÐēŅзÐļ ÐūŅÐīÐĩÐŧŅÐ―ŅŅ ŅÐĩКŅÐļÐđ ÐŧÐūКÐūОÐūŅÐļÐēа ŅаКÐķÐĩ ÐļŅÐŋÐūÐŧŅзŅÐĩŅŅŅ ÐīÐēŅŅ ÐšÐ°Ð―Ð°ÐŧŅÐ―Ð°Ņ ÐŧÐļÐ―ÐļŅ ŅÐēŅзÐļ ŅŅÐ°Ð―ÐīаŅŅа RS485, Ð―Ðū Ņ Ð―Ð°ÐŋŅŅÐķÐĩÐ―ÐļÐĩО, ŅÐēÐĩÐŧÐļŅÐĩÐ―Ð―ŅО ÐīÐū 12 Ð.
ÐÐļŅÐ°Ð―ÐļÐĩ ÐÐÐĄÐĢ Ðļ Ð â ÐīÐēŅŅ ÐšÐ°Ð―Ð°ÐŧŅÐ―ÐūÐĩ, ÐūŅŅŅÐĩŅŅÐēÐŧŅÐĩŅŅŅ ÐūŅ ÐąÐūŅŅÐūÐēÐūÐđ ŅÐĩŅÐļ ŅÐĩŅÐĩз ÐļŅŅÐūŅÐ―ÐļКÐļ ÐŋÐļŅÐ°Ð―ÐļŅ ÐÐ-ÐÐ G2 Ðļ G3. РазÐīÐĩÐŧŅÐ―ÐūÐĩ ŅÐŧÐĩКŅŅÐūŅÐ―Ð°ÐąÐķÐĩÐ―ÐļÐĩ КаÐķÐīÐūÐģÐū ÐšÐ°Ð―Ð°Ðŧа ÐŋÐūзÐēÐūÐŧŅÐĩŅ ÐÐÐĄÐĢ Ðļ Ð Ðē ŅÐŧŅŅаÐĩ Ð―ÐĩÐļŅÐŋŅаÐēÐ―ÐūŅŅÐļ ÐūÐīÐ―ÐūÐģÐū ÐļŅŅÐūŅÐ―ÐļКа ÐŋÐļŅÐ°Ð―ÐļŅ (ÐļÐŧÐļ ÐūÐīÐ―ÐūÐģÐū ÐšÐ°Ð―Ð°Ðŧа) ÐŋŅÐūÐīÐūÐŧÐķÐļŅŅ ŅÐ°ÐąÐūŅŅ.
ÐÐŧÐĩКŅŅÐļŅÐĩŅКÐļОÐļ аÐŋÐŋаŅаŅаОÐļ ŅÐŧÐĩКŅŅÐūÐēÐūза ŅÐļŅŅÐĩОа ÐÐÐĄÐĢ Ðļ Ð ŅÐŋŅаÐēÐŧŅÐĩŅ ŅÐĩŅÐĩз ÐąÐŧÐūКÐļ ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ КÐūÐ―ŅаКŅÐūŅаОÐļ ÐÐĢÐ Ðē ŅÐūÐūŅÐēÐĩŅŅŅÐēÐļÐļ Ņ заÐŧÐūÐķÐĩÐ―Ð―ÐūÐđ ÐŋŅÐūÐģŅаООÐūÐđ.
Ðа ŅÐļŅ. 4 ÐŋŅÐļÐēÐĩÐīÐĩÐ―Ð° ÐŋŅÐļÐ―ŅÐļÐŋÐļаÐŧŅÐ―Ð°Ņ ŅŅ ÐĩОа, ÐŋÐū КÐūŅÐūŅÐūÐđ ОÐūÐķÐ―Ðū ÐŋÐūŅÐŧÐĩÐīÐļŅŅ, КаК ŅÐ°ÐąÐūŅаÐĩŅ ÐÐÐĄÐĢ Ðļ Ð. Ðа ÐąÐŧÐūК ŅÐĩÐ―ŅŅаÐŧŅÐ―ÐūÐģÐū ÐēŅŅÐļŅÐŧÐļŅÐĩÐŧŅ ÐÐĶÐ ÐŋÐūŅŅŅÐŋаÐĩŅ КÐūÐžÐ°Ð―Ðīа ÐūŅ ÐąÐŧÐūКа ŅÐļÐģÐ―Ð°ÐŧÐūÐē Ņ ÐŋŅÐŧŅŅа ÐÐĄÐ ÐļÐŧÐļ ÐūŅ ÐēÐĩŅŅ Ð―ÐĩÐģÐū ŅŅÐūÐēÐ―Ņ. ÐÐĶÐ ÐūÐąŅÐ°ÐąÐ°ŅŅÐēаÐĩŅ ÐŋÐūÐŧŅŅÐĩÐ―Ð―ŅŅ КÐūÐžÐ°Ð―ÐīŅ Ðē ŅÐūÐūŅÐēÐĩŅŅŅÐēÐļÐļ Ņ заÐŧÐūÐķÐĩÐ―Ð―ÐūÐđ ÐŋŅÐūÐģŅаООÐūÐđ, ŅŅКÐūÐēÐūÐīŅŅÐēŅŅŅŅ ÐŋÐūÐšÐ°Ð·Ð°Ð―ÐļŅОÐļ, ÐŋÐūŅŅŅÐŋаŅŅÐļОÐļ ŅÐū ŅŅÐĩÐīŅŅÐē ÐļзОÐĩŅÐĩÐ―ÐļÐđ ÐĄÐ.
Ð ŅÐŧŅŅаŅŅ , КÐūÐģÐīа ÐŋÐūÐŧŅŅÐĩÐ―Ð―Ð°Ņ КÐūÐžÐ°Ð―Ðīа ОÐūÐķÐĩŅ ÐąŅŅŅ ÐēŅÐŋÐūÐŧÐ―ÐĩÐ―Ð°, ÐÐĶÐ ÐŋÐĩŅÐĩÐīаÐĩŅ КÐūÐžÐ°Ð―ÐīŅ ÐąÐŧÐūКŅ ŅÐŋŅаÐēÐŧÐĩÐ―ÐļŅ КÐūÐ―ŅаКŅÐūŅаОÐļ ÐÐĢÐ, КÐūŅÐūŅŅÐđ ŅÐūзÐīаÐĩŅ ŅÐŧÐĩКŅŅÐļŅÐĩŅКŅŅ ŅÐĩÐŋŅ ÐīÐŧŅ ÐūÐŋŅÐĩÐīÐĩÐŧÐĩÐ―Ð―ÐūÐģÐū аÐŋÐŋаŅаŅа Ð. ÐÐūŅÐŧÐĩ ŅÐūÐģÐū КаК аÐŋÐŋаŅаŅ ÐēŅÐŋÐūÐŧÐ―ÐļŅ ŅÐ°ÐąÐūŅŅ, ŅÐēÐūÐļОÐļ ÐąÐŧÐūКÐļŅÐūÐēÐūŅÐ―ŅОÐļ КÐūÐ―ŅаКŅаОÐļ заОŅКаÐĩŅ ŅÐĩÐŋŅ Ð―Ð° ÐąÐŧÐūК ÐēŅ ÐūÐīÐ―ŅŅ ŅÐļÐģÐ―Ð°ÐŧÐūÐē ÐÐÐĄ, КÐūŅÐūŅŅÐđ, Ðē ŅÐēÐūŅ ÐūŅÐĩŅÐĩÐīŅ, ÐūŅÐŋŅаÐēÐŧŅÐĩŅ ÐļÐ―ŅÐūŅОаŅÐļŅ Ðū ÐēŅÐŋÐūÐŧÐ―ÐĩÐ―ÐļÐļ заÐīаŅÐļ Ð―Ð° ÐÐĶÐ. ÐŅÐĩ ÐūÐŋÐĩŅаŅÐļÐļ, ÐēŅÐŋÐūÐŧÐ―ŅÐĩОŅÐĩ ÐÐÐĄÐĢ Ðļ Ð, а ŅаКÐķÐĩ аÐŋÐŋаŅаŅаОÐļ, Ðļ ÐŋÐūÐšÐ°Ð·Ð°Ð―ÐļŅ ŅŅÐĩÐīŅŅÐē ÐļзОÐĩŅÐĩÐ―ÐļÐđ ÐēŅÐēÐūÐīŅŅŅŅ Ð―Ð° ОÐūÐ―ÐļŅÐūŅŅ Ðļ заÐŋÐļŅŅÐēаŅŅŅŅ Ð―Ð° ŅÐŧÐĩКŅŅÐūÐ―Ð―ŅÐđ Ð―ÐūŅÐļŅÐĩÐŧŅ ÐīÐŧŅ ÐīаÐŧŅÐ―ÐĩÐđŅÐĩÐģÐū Ð°Ð―Ð°ÐŧÐļза.
(ÐŅÐūÐīÐūÐŧÐķÐĩÐ―ÐļÐĩ ŅÐŧÐĩÐīŅÐĩŅ)
Ð.Ð. ÐÐÐÐÐÐÐÐÐÐ,
ÐŋŅÐĩÐŋÐūÐīаÐēаŅÐĩÐŧŅ ÐКаŅÐĩŅÐļÐ―ÐąŅŅÐģŅКÐūÐģÐū ŅŅÐĩÐąÐ―ÐūÐģÐū ŅÐĩÐ―ŅŅа ÐŋŅÐūŅÐĩŅŅÐļÐūÐ―Ð°ÐŧŅÐ―ŅŅ КÐēаÐŧÐļŅÐļКаŅÐļÐđ â 1 ÐĄÐēÐĩŅÐīÐŧÐūÐēŅКÐūÐđ ÐīÐūŅÐūÐģÐļ